
两轮自平衡机器人 (Two-Wheeled Self-Balancing Robot)
Published:
基于 STM32 与 PID 控制算法的倒立摆系统,实现了直立环与速度环的串级控制。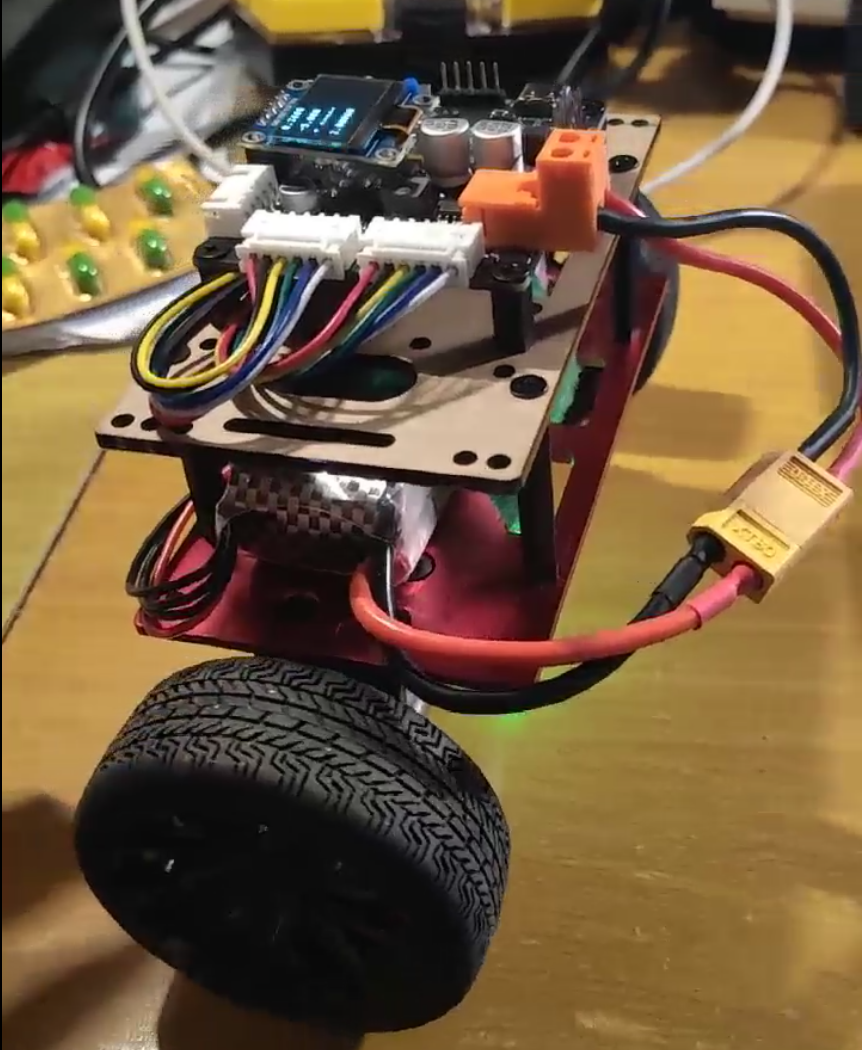

Published:
基于 STM32 与 PID 控制算法的倒立摆系统,实现了直立环与速度环的串级控制。
Published:
基于 TI MSPG3507 与 Fusion360 建模的软硬结合项目,实现了复杂图形的高精度绘制。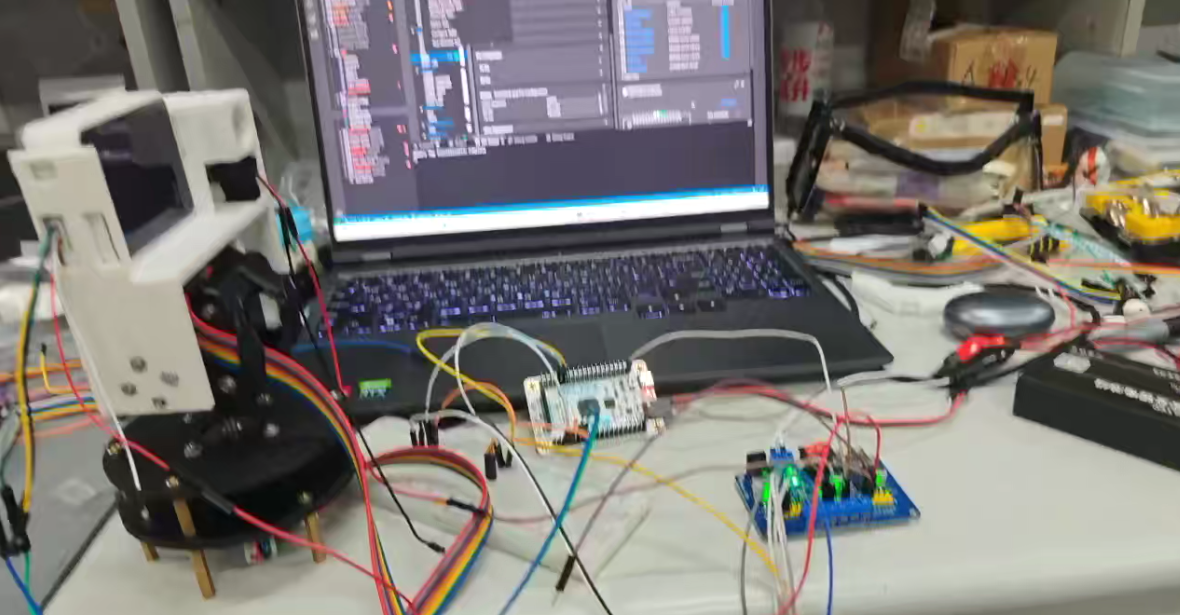
Published:
基于 VS Code Remote 的远程开发实践,分别使用 Python (Gradio) 与 C++ (OpenCV) 实现的高性能端侧视觉应用。

