
二维云台绘图系统 (Two-Axis Drawing Gimbal)
Published:
🛠 项目概述 (Project Overview)
这是一个典型的机械电控一体化项目。我独立设计并制作了一个二自由度(2-DOF)云台,能够控制激光笔或画笔在墙面上绘制预设的图形(如正弦波、圆形、爱心)。
- 核心功能:步进电机精准控制、复杂轨迹插补算法、G代码解析。
- 精度指标:定位精度达到 ±0.5°。
- 开发周期:2025.06 - 2025.09
💻 技术栈 (Tech Stack)
| 领域 | 核心技术 |
|---|---|
| 主控芯片 | TI MSPG3507 (Cortex-M0+) |
| 开发环境 | Keil MDK5, VS Code |
| 机械设计 | Fusion 360 (3D建模与仿真) |
| 控制算法 | Bresenham 直线插补, 圆弧插补, k级调速 |
| 硬件驱动 | A4988 步进电机驱动, PWM 脉冲生成 |
⚙️ 硬件与机械设计 (Hardware Design)
3D建模与结构设计
我使用 Fusion 360 完成了所有零部件的设计。为了保证转动的平滑性,我在关节处设计了轴承槽,并考虑到 3D 打印的公差(0.2mm)。
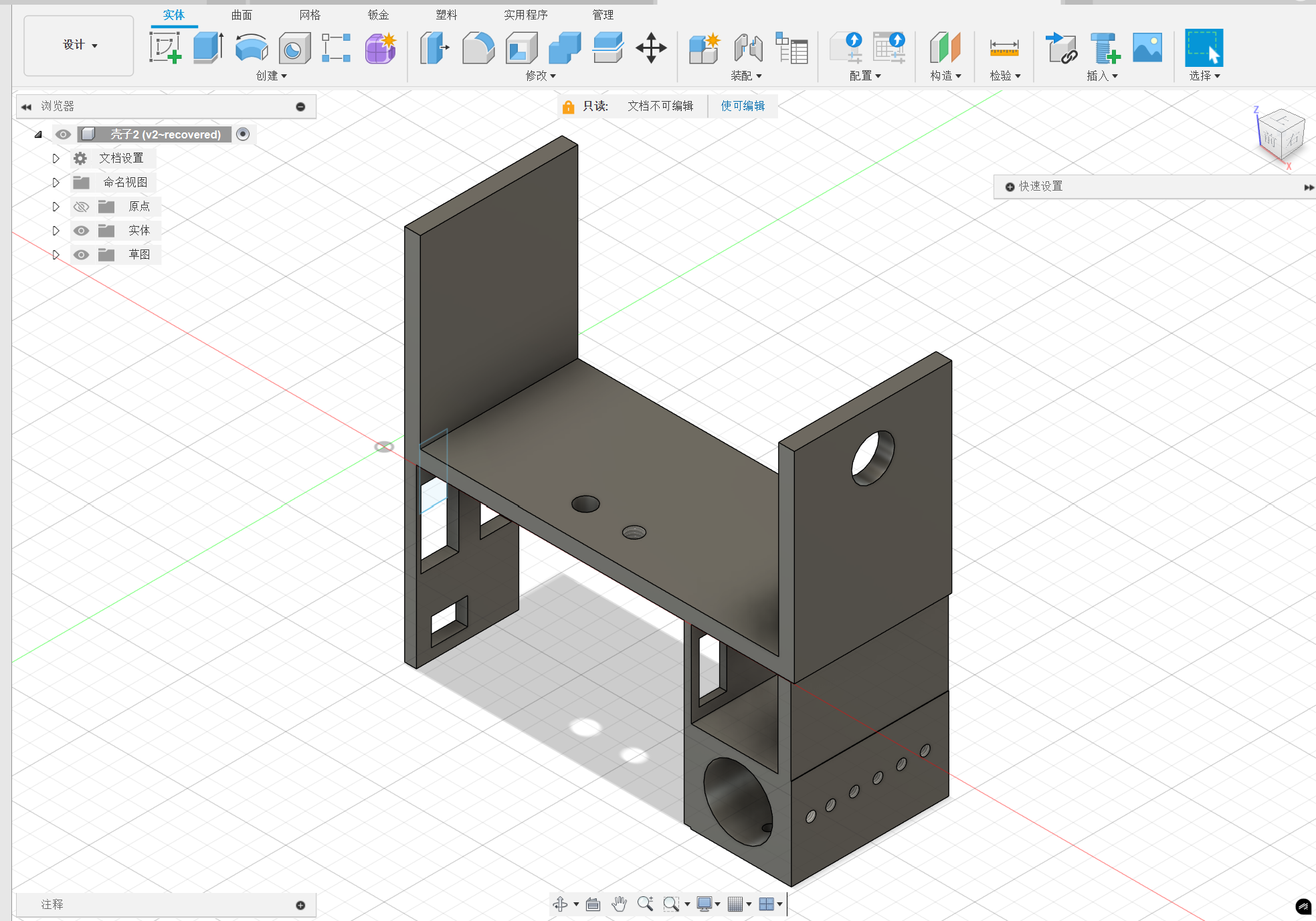
图1:Fusion 360 结构设计视图
🧠 软件与算法实现 (Software & Algorithm)
1. 步进电机 S 型加减速与 k 级调速
为了防止电机在启动和停止时产生抖动(丢步),我没有使用简单的梯形加减速,而是编写了 S 型曲线(Sigmoid) 的速度控制算法,并实现了 k 级调速 以适应不同绘图速度的需求。
// S型加减速与k级调速核心逻辑 (伪代码)
void Step_Motor_S_Curve(int steps, int speed_k) {
for(int i=0; i<steps; i++) {
// 根据k级速度因子动态调整周期
int current_period = sigmoid_lookup[i] / speed_k;
// 动态调整定时器重装载值
DL_TimerG_setLoadValue(TIM2, current_period);
}
}
2. 轨迹插补算法
如何在二维平面上画出一个完美的圆?我实现了 Bresenham 算法 的变种,将数学坐标实时转换为两个电机的脉冲差,从而实现多轴联动。
📝 制作过程与踩坑记录 (Development Log)
[2025-07-27] 严重的“丢步”问题
现象:画圆的时候,起点和终点重合不了,总是差 5mm 左右。 排查:
- 以为是插补算法问题,检查了一周代码,没问题。
- 用示波器看 PWM 波形,发现波形很完美。
- 最终原因:机械结构过重,电机的力矩不够! 解决:将云台悬臂的填充率从 100% 降到 20%(3D打印设置),并在电机轴上增加了减速齿轮组。
[2025-08-10] 串口数据包粘包
现象:上位机发送复杂的 G 代码时,单片机经常解析错误。
解决:设计了一个环形缓冲区(Ring Buffer),并定义了帧头帧尾协议 0xAA ... 0x55,彻底解决了数据解析问题。
🎥 实物运行演示 (Live Demo)
这里展示系统在实际运行中的表现。视频未加速,可以清晰看到步进电机在绘制不同曲率线条时的加减速控制效果。
1. 绘制正弦波 (Sine Wave)
难点:验证 Bresenham 算法在连续曲线上的插补平滑度。
2. 绘制爱心 (Heart Shape)
难点:对称图形的坐标变换与尖角处的路径规划。
3. 绘制圆 (Pentagram)
难点:直线段的精确衔接与电机急停急转的惯性抑制。