
树莓派视觉一体化监控系统 (Raspberry Pi Integrated Vision System)
Published:
🛠 项目概述 (Project Overview)
这是一个软硬结合的计算机视觉项目,旨在树莓派 4B 上构建一个低延迟、可交互的视觉监控系统。项目最大的亮点在于“双模态实现”:我分别使用了开发效率极高的 Python (Gradio) 和运行效率极致的 C++ (OpenCV + HTTP) 两种技术栈完成了同一套系统,并进行了性能对比。
- 核心功能:实时视频流传输、ROI (感兴趣区域) 动态框选、主色调提取 (K-Means)、颜色报警算法。
- 开发模式:采用 VS Code Remote-SSH 进行全流程远程开发,模拟真实的工业级嵌入式开发场景。
- 教程产出:编写了 3 份共计 40+ 页的技术文档(VSCode配置、Python实战、C++实战)。
💻 技术栈 (Tech Stack)
| 维度 | Python 版本 (快速原型) | C++ 版本 (高性能部署) |
|---|---|---|
| 语言标准 | Python 3.11 | C++ 17 |
| 视觉库 | OpenCV-Python (cv2) | OpenCV 4.6 (C++) |
| Web 框架 | Gradio (现代化 UI) | cpp-httplib (轻量级 Server) |
| 依赖管理 | uv (极速包管理器) | CMake (编译构建) |
| 数据交互 | JSON API | JSON (nlohmann/json) |
⚙️ 模块一:现代化远程开发环境 (Dev Environment)
为了解决传统嵌入式开发“写代码在电脑,跑代码在板子”的割裂感,我搭建了基于 VS Code Remote-SSH 的无缝开发环境。
关键配置
通过配置 SSH 免密登录与 ~/.ssh/config,实现了像开发本地项目一样开发树莓派。
# SSH Config 配置示例
Host rpi
HostName 192.168.1.180
User pi
IdentityFile ~/.ssh/id_ed25519

图1:VS Code 远程连接树莓派进行代码调试
🐍 模块二:Python 版本实现 (Gradio 低代码)
在 Python 版本中,我使用了 Gradio 框架,仅用 300 行代码就实现了一个包含实时画面、控制面板、参数调节的现代化 Web UI。
核心算法:基于 HSV 的颜色报警
利用 OpenCV 将 BGR 转换到 HSV 空间,并处理红色在 Hue 环上的“跨界”问题(0°和179°)。
# 核心逻辑:构建 HSV 掩膜 (Python)
def build_mask_from_hsv_ranges(bgr, hsv_ranges):
hsv = cv2.cvtColor(bgr, cv2.COLOR_BGR2HSV)
mask = None
for r in hsv_ranges:
lower = np.array(r["lower"], dtype=np.uint8)
upper = np.array(r["upper"], dtype=np.uint8)
m = cv2.inRange(hsv, lower, upper)
# 逻辑或操作,合并多个颜色区间
mask = m if mask is None else cv2.bitwise_or(mask, m)
return cv2.medianBlur(mask, 5) # 中值滤波去噪

图2:基于 Gradio 的交互式控制台
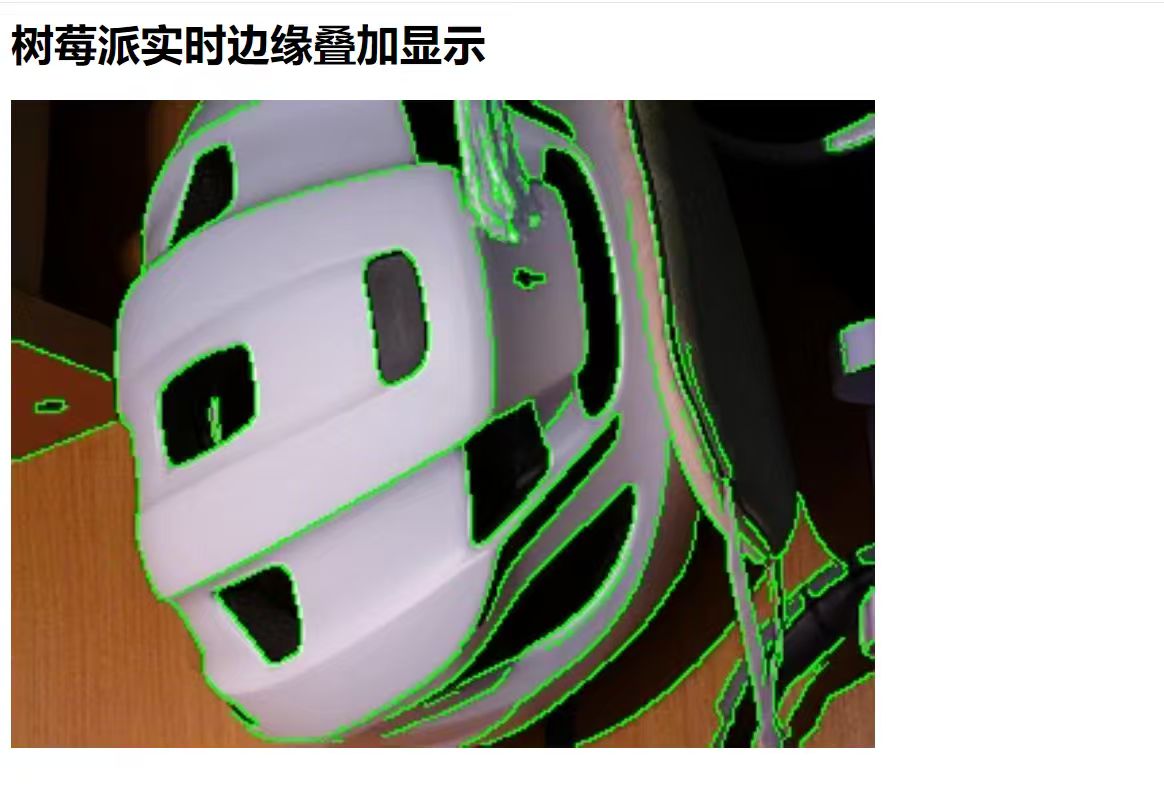
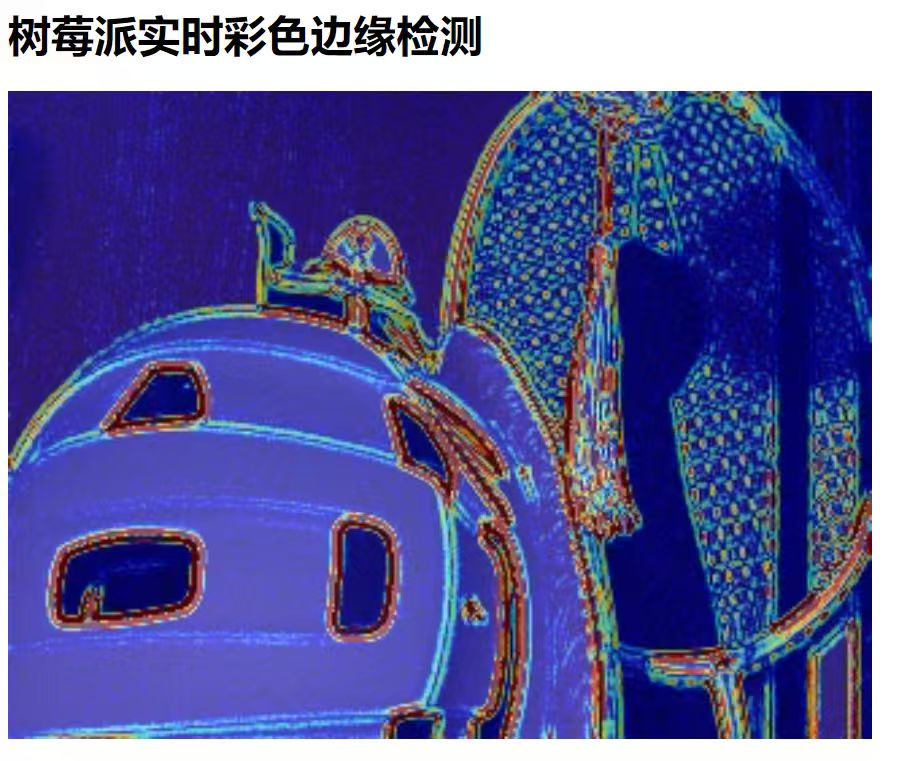
🔬 算法验证:基于 Flask 的实时边缘检测 (Algorithm Demo)
在最终集成 Gradio 之前,我首先使用轻量级的 Flask 框架编写了原型脚本 (bianjie.py),验证了 OpenCV Canny 算子在树莓派上的实时性能。
- 实现原理:通过 Python 生成器 (
yield) 将处理后的 OpenCV 帧封装为 HTTP Multipart 流,直接推送到浏览器。 - 算法效果:实现了边缘叠加 (Overlay) 与 热力图 (Heatmap) 两种显示模式。
⚡ 模块三:C++ 版本实现 (高性能重构)
为了追求极致的性能(FPS),我使用 C++ 17 重构了整个系统。移除了 Python 解释器的开销,直接操作内存。
难点攻克:MJPEG 流媒体服务器
在 C++ 中没有 Gradio 这样现成的库,我使用 cpp-httplib 手写了一个多线程 HTTP 服务器,实现了 MJPEG 视频流的推送。
// MJPEG 推流核心代码 (C++)
svr.Get("/stream.mjpg", [](const httplib::Request&, httplib::Response& res) {
res.set_content_provider(
"multipart/x-mixed-replace; boundary=frame",
[](size_t, httplib::DataSink& sink) {
while (g_running.load()) {
std::vector<uchar> jpg;
{
std::lock_guard<std::mutex> lk(g_mtx);
jpg = g_latest_jpeg; // 获取最新帧(线程安全)
}
if (!jpg.empty()) {
// 手动构建 HTTP Multipart 协议头
std::ostringstream oss;
oss << "--frame\r\nContent-Type: image/jpeg\r\n"
<< "Content-Length: " << jpg.size() << "\r\n\r\n";
std::string hdr = oss.str();
sink.write(hdr.data(), hdr.size());
sink.write(reinterpret_cast<const char*>(jpg.data()), jpg.size());
sink.write("\r\n", 2);
}
std::this_thread::sleep_for(std::chrono::milliseconds(50));
}
return true;
}
);
});

图3:C++ 编写的轻量级 Web 控制台
📝 总结与思考 (Conclusion)
- 性能对比:在同等分辨率下,C++ 版本的 CPU 占用率比 Python 版本降低了约 40%,帧率更加稳定。
- 开发效率:Python 版本开发仅耗时 2 天,而 C++ 版本涉及 CMake 配置和手动内存管理,耗时约 5 天。
- 工程价值:该项目展示了从快速原型验证 (POC) 到高性能产品交付的完整工程链路。
📂 原创教程文档下载 (PDF)
这是我编写的完整开发文档,共计 40+ 页,包含详细的配置步骤和代码解析: